TartanDrive2.0
Demonstration on the TartanDrive 2.0 dataset using an ATV in off-road terrain.
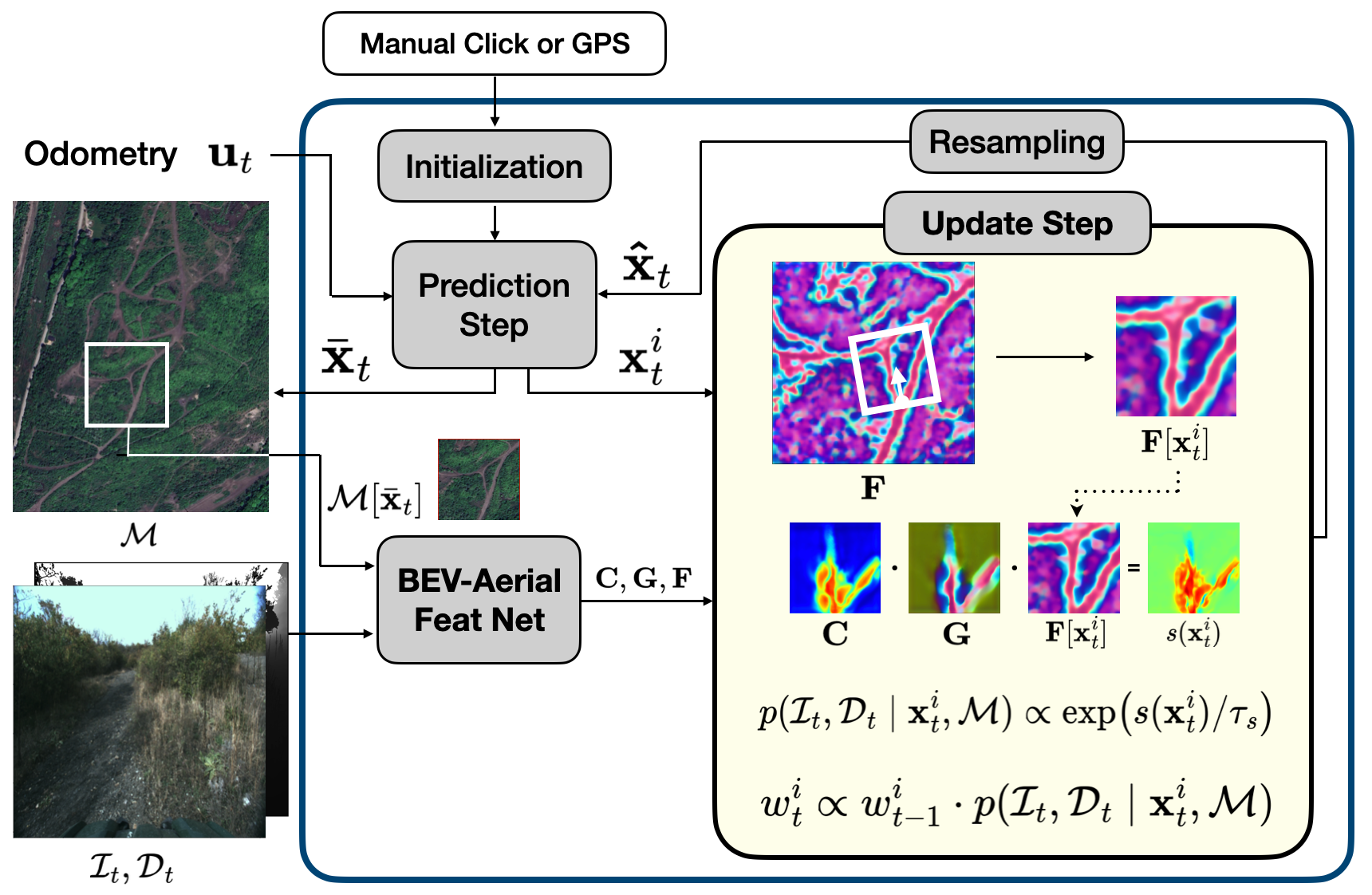
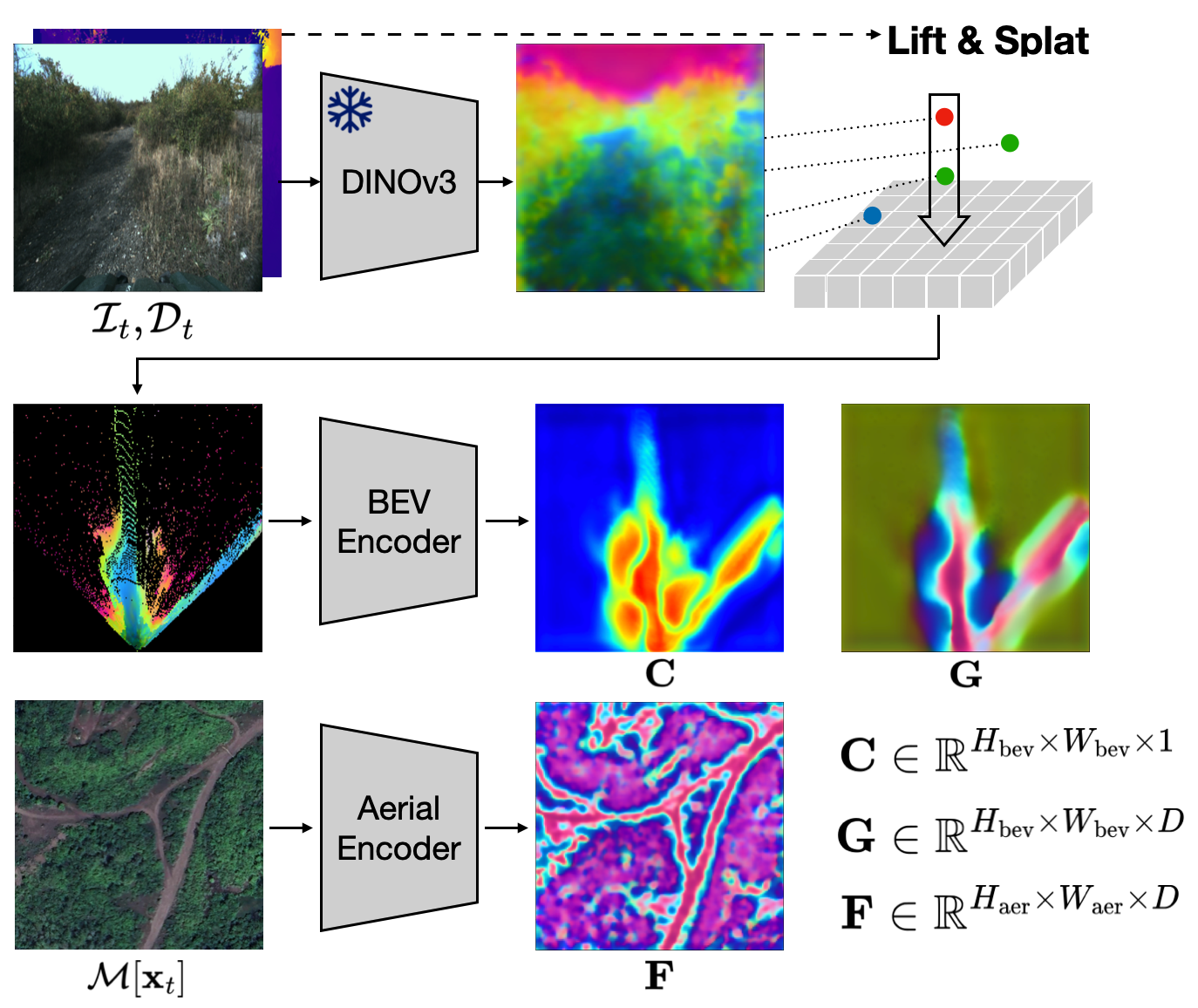
We propose BEV-Patch-PF, a GPS-free sequential geo-localization system that integrates a particle filter with learned bird's-eye-view (BEV) and aerial feature maps. From onboard RGB and depth images, we construct a BEV feature map. For each 3-DoF particle pose hypothesis, we crop the corresponding patch from an aerial feature map computed from a local aerial image queried around the approximate location. BEV-Patch-PF computes a per-particle log-likelihood by matching the BEV features to the aerial patch features.
On two real-world off-road datasets, our method achieves 7.5x lower absolute trajectory error (ATE) on seen routes and 7.0x lower ATE on unseen routes compared to a retrieval-based baseline, while maintaining accuracy under dense canopy and shadow. The system runs in real time at 10 Hz on an NVIDIA Tesla T4, enabling practical robot deployment.
Demonstration on the TartanDrive 2.0 dataset using an ATV in off-road terrain.
Demonstration in the Grace Quarters environment with a Clearpath Warthog, handling canopy and shadows.
Real-time deployment in a local urban park using a Clearpath Jackal (equipped with a Tesla T4).
Real-time deployment on a university campus using a 1:8 scale high-speed vehicle (equipped with a Jetson AGX Orin).
This work is partially supported by the ARL SARA (W911NF-24-2-0025 and W911NF-23-2-0211). Any opinions, findings, and conclusions expressed in this material are those of the authors and do not necessarily reflect the views of the sponsors.
@article{TBD,
author = {Lee, Dongmyeong and Quattrociocchi, Jesse and Ellis, Christian and Rana, Rwik and Adkins, Amanda and Uccello, Adam and Warnell, Garrett and Biswas, Joydeep},
title = {BEV-Patch-PF: Particle Filtering with BEV-Aerial Feature Matching for Off-Road Geo-Localization},
journal = {TBD},
year = {2026},
}